Implementing Q-learning
Today, we will look at a simple example for implementing Q-learning. Hopefully, you will have a clear understanding after reading this article.
Environment

Our environment is a 1x7 grid. S is the Start state and G is the goal state. The agent can only move left or right. The game ends when the agent arrives at G.
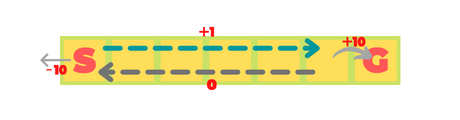
The rewards are as follows: +1 on each step towards G, -10 on illegal step
(i.e. moving out of the grid)and finally +10 on reaching G.
Code the agent
def agent(num_iterations=100):
game = Slider()
reward_graph = []
episode_graph = []
game.reset()
for episode in range(num_iterations):
state = 0
# Used to count the number of moves in a single iteration
moves = 0
episodic_reward = 0
while state != 6:# and moves < 20:
action = game.get_action(state)
new_state, reward = game.step(state, action)
# Temporal Difference
action = 0 if action == -1 else 1
temp_diff = reward + max(game.q_table[new_state]) - game.q_table[state][action]
# Q_learning
game.q_table[state][action] += game.alpha * temp_diff
state = new_state
moves += 1
episodic_reward += reward
episode_graph.append(moves)
reward_graph.append(episodic_reward)
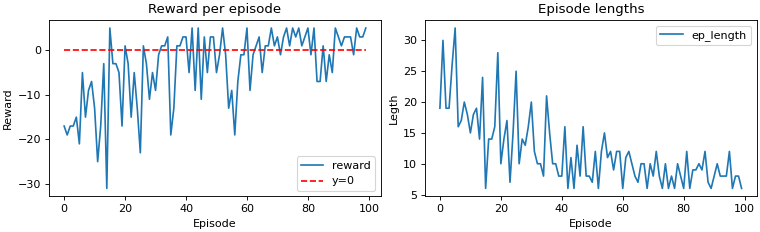
Result
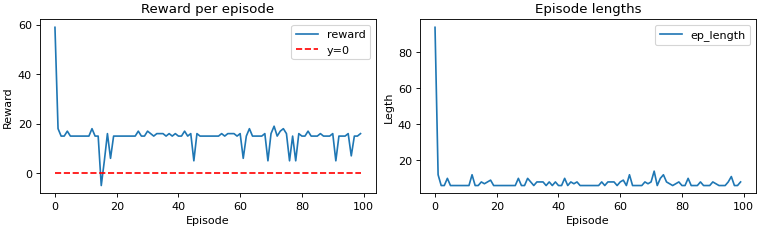
Those sudden spikes are due to exploration vs exploitation tradeoff. Simply put, it explores the environment looking for the best action to take at each time step. This does mean that our agent sometimes selects a bad action. However, this is how our agent learns.
Policy and Q-table
Below is the policy for our trained model.
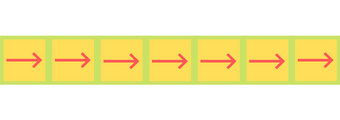
Note: for the Goal state, the policy prefers -> even though the episode
restarts when the agent reaches the Goal State. This is down to how the Q-table
was initialised and how the policy was chosen.
This is the Q-table after training. Q-table was initialised with zeros rather than randomly. Why don’t you try to implement different things(like random initialization)? This will certainly help in better understanding.
| State | <- | -> |
|---|---|---|
| 0 | -0.98 | 1.13 |
| 1 | 0.05 | 1.25 |
| 2 | 0.12 | 1.39 |
| 3 | 0.08 | 1.95 |
| 4 | 0.06 | 3.55 |
| 5 | 0.18 | 6.34 |
| 6 | 0.00 | 0.00 |
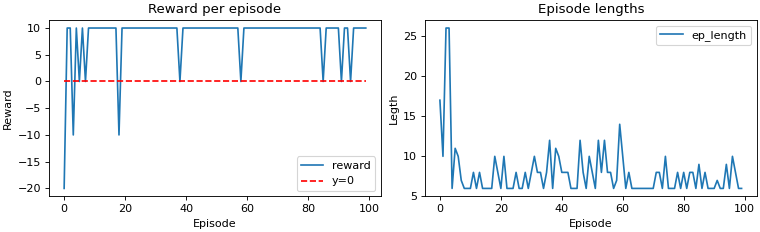
Same agent different Rewards
In this section, we will change the rewards to see how the agent behaves.
First Reward System
Rewards
+10for reaching G.-10for an illegal move.
This time, there will be no reward for moving towards the goal state. Let’s see the agent’s performance.
Q-table
The policy remained unchanged, therefore, only the q-table is shown.
| S | <- | -> |
|---|---|---|
| 0 | -1.31 | 0.01 |
| 1 | 0.00 | 0.05 |
| 2 | 0.00 | 0.25 |
| 3 | 0.01 | 0.94 |
| 4 | 0.02 | 2.85 |
| 5 | 0.12 | 6.34 |
| 6 | 0.00 | 0.00 |
Second Reward System
Rewards
+10for reaching G-10for an illegal action-1for all other actions.
Q-table
| S | <- | -> |
|---|---|---|
| 0 | -2.94 | -1.82 |
| 1 | -1.44 | -1.44 |
| 2 | -0.98 | -0.98 |
| 3 | -0.50 | -0.06 |
| 4 | -0.25 | 2.11 |
| 5 | -0.04 | 6.34 |
| 6 | 0.00 | 0.00 |
Conclusion
After looking at three different reward systems and their performance, it is worth mentioning that initally the episode length is high. Moreover, the episode length decreases over time. Epsilon-decay is also another concept worth looking into.
The code is available on Github. Tinker with the code and watch your agent learn.